
PS: English profile is at the bottom
个人简介
梁宵,教授,博士,博士生导师,沈阳航空航天大学自动化学院副院长,辽宁省飞行器测试与控制重点实验室副主任,辽宁省“百千万人才工程”千人层次资助,辽宁省“兴辽英才计划”青年拔尖人才资助,沈阳市拔尖人才,沈阳航空航天大学“展翼英才”。2007年本科毕业于东北大学自动化专业,同年留校保送控制理论与控制工程专业硕士研究生,2013年于北京航空航天大学获得导航、制导与控制专业博士学位,2015年到英国Swansea University(斯旺西大学)访问交流,目前就职于沈阳航空航天大学自动化学院,主要从事飞行器设计与先进控制、多智能体协同与任务载荷等方面的工作,具备扎实的理论基础和实践经验。
近年来获2023中国仿真学会创新技术二等奖1项(1/8)、2021辽宁省科技进步二等奖一项(3/6)、2019中国航空学会三等奖1项(1/10)、二等奖1项(3/10),2015辽宁省科技进步三等奖1项(3/6),2015沈阳市科技进步三等奖1项(3/6),“挑战杯”、全国研究生电子设计竞赛等国家级比赛亚军1项(1/6),一等奖1项(1/6),二等奖3项(1/6),省级竞赛奖励10余项。先后主持科研项目20余项,其中国家自然科学基金面上项目1项、青年基金1项,航空科学基金2项,辽宁省自然科学基金2项,辽宁省教育厅项目4项,沈阳市科技计划项目1项,人才支撑项目3项,本科生教改项目1项,横向课题5项,及中航空业沈阳飞机设计研究所项目2项。发表SCI期刊论文10余篇、EI期刊论文20余篇、一级学报3篇、EI会议论文6篇,授权发明专利8项,合作编写专著2项、国家标准1项。
担任《无人系统技术》编委,中国航空宇航学会(CSAA)会员电气和电子工程师协会(IEEE)会员,核心期刊《光电与控制》、EI期刊《控制与决策》、SCI期刊《Aerospace Science & Technology》的审稿人。
研究方向
飞行器设计、导航、制导与控制,飞行器仿真
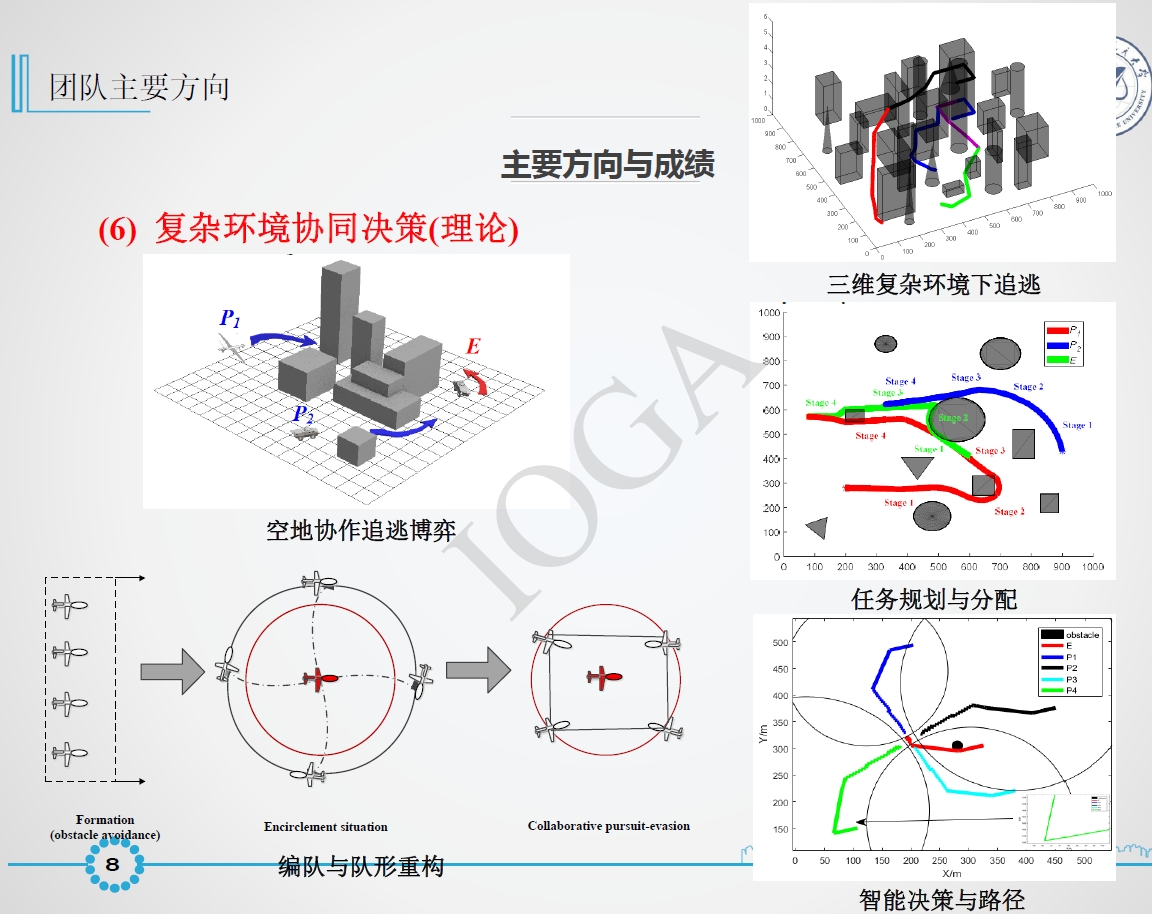
人工智能、决策博弈、任务规划
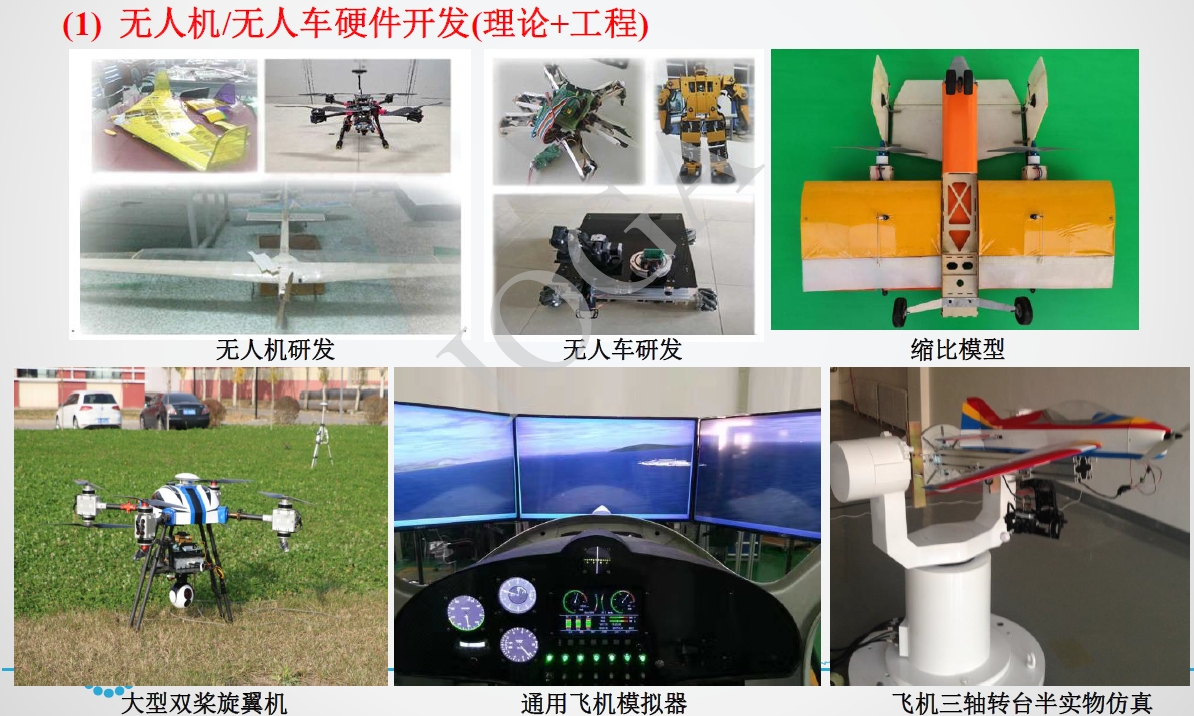
异构多智能体协作、硬件设计与开发

招生要求
联系方式
办公室:航空大楼A1-305
联系邮箱:connyzone@126.com
联系电话:024-89723961
获奖与荣誉情况
[1] 中国仿真学会,中国仿真学会创新技术奖,二等奖,2023(排名1/8)
[2] 辽宁省人民政府,辽宁省科学技术进步奖,二等奖,2021(排名3/6)
[3] 中国航空学会,中国航空学会科学技术奖,三等奖,2019 (排名1/10)
[4] 中国航空学会,中国航空学会科学技术奖,二等奖,2019 (排名3/10)
[5] 第九届中国研究生未来飞行器创新大赛,全国亚军,4万元奖金,2023 (排名1/6)
[6] 第十五届全国研究生电子设计竞赛,全国总决赛,二等奖,2020(排名1/6)
[7] 第十六届“挑战杯”全国大学生科技竞赛,全国总决赛,二等奖,2019 (排名1/6)
[8] 第十四届全国研究生电子设计竞赛,全国总决赛,二等奖,2019 (排名1/6)
[9] 第十三届全国研究生电子设计竞赛,全国总决赛,一等奖,2018 (排名1/6)
[10] 辽宁省“百千万人才工程”千人层次,2020
[11] 辽宁省“兴辽英才计划”青年拔尖人才,2019
[12] 辽宁省“百千万人才工程”万人层次,2017
[13] 沈阳市 拔尖人才,2020
[14] 沈阳市 高层次人才,2017
[15] 辽宁省科学技术奖励委员会,辽宁省科学技术进步奖,三等奖,2015 (排名3/6)
[16] 沈阳市人民政府,沈阳市科学技术进步奖,二等奖,2015 (排名3/6)
[17] 沈阳航空航天大学,展翼英才,2020
科研项目情况(主持)
[1] 国家自然科学基金 面上项目:不完全信息下三维复杂地形环境中的异构协作追逃博弈研究
[2] 国家自然科学基金 青年基金:三维复杂环境下基于无人机追逃问题的航路规划方法研究
[3] 航空科学基金:无GPS信息下基于异构UAV/UGVs协作感知的定位与三维地图融合重构研究
[4] 航空科学基金:车载UAV移动监视平台及其关键技术研究
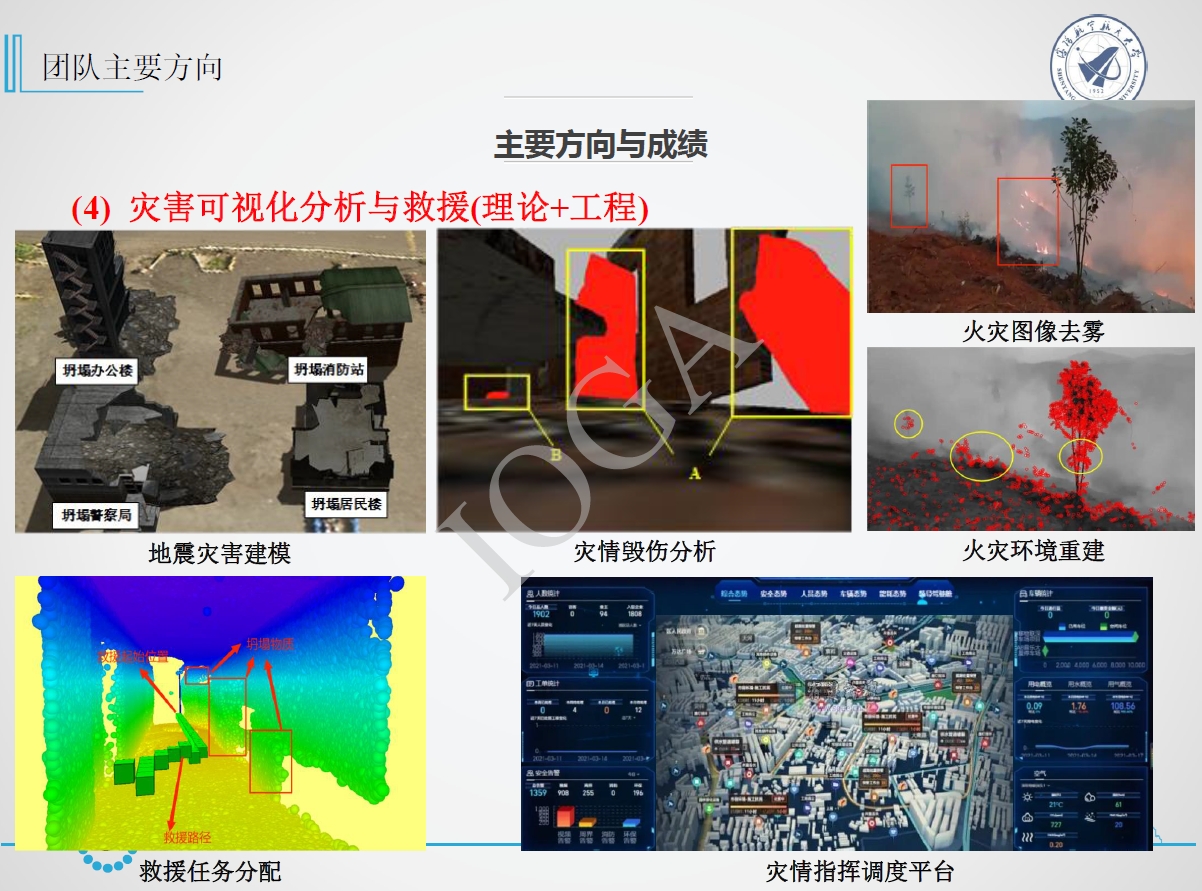
[5] 辽宁省人才项目:灾害救援任务中基于视觉的异构UAV/UGV协作感知与避障方法研究
[6] 辽宁省自然科学基金:异构UAV/UGV移动平台机器人的跟踪、避障与精确导引技术研究
[7] 辽宁省教育厅 重点项目:隧道内复杂环境感知与重建救援机器人设计与开发
[8] 辽宁省教育厅项目:基于多传感器信息融合的安防与救援UAV/UGV异构协作系统研究
[9] 辽宁省教育厅项目:恶劣天气下面向灾害救援的四旋翼自主起降/飞行/投掷一体化控制研究
[10] 辽宁省教育厅项目:校园防疫巡检无人系统设计与开发
[11] 沈阳市科技计划项目:三维复杂环境中UAV/UGV异构系统的协作感知避障与决策技术研究
[12] 人才支撑项目:无人机动态环境下态势推演理论与航路规划研究
[13] 人才支撑项目:基于多传感器信息融合的安防与救援UAV/UGV异构协作系统研究
[14] 校本科生教改:基于在线开放资源的《控制工程基础》总复习与知识点串联
[15] 重点实验室课题:大型双桨系留无人机设计与开发
[16] 重点实验室课题:民航客机飞行模拟器设计与开发
[17] 横向课题:AC313A大型航空救援直升机机载装备研究
[18] 横向课题:XX空中应急指挥机在航空应急救援领域应用研究
[19] 横向课题:XX智能移动机器人平台设计与开发
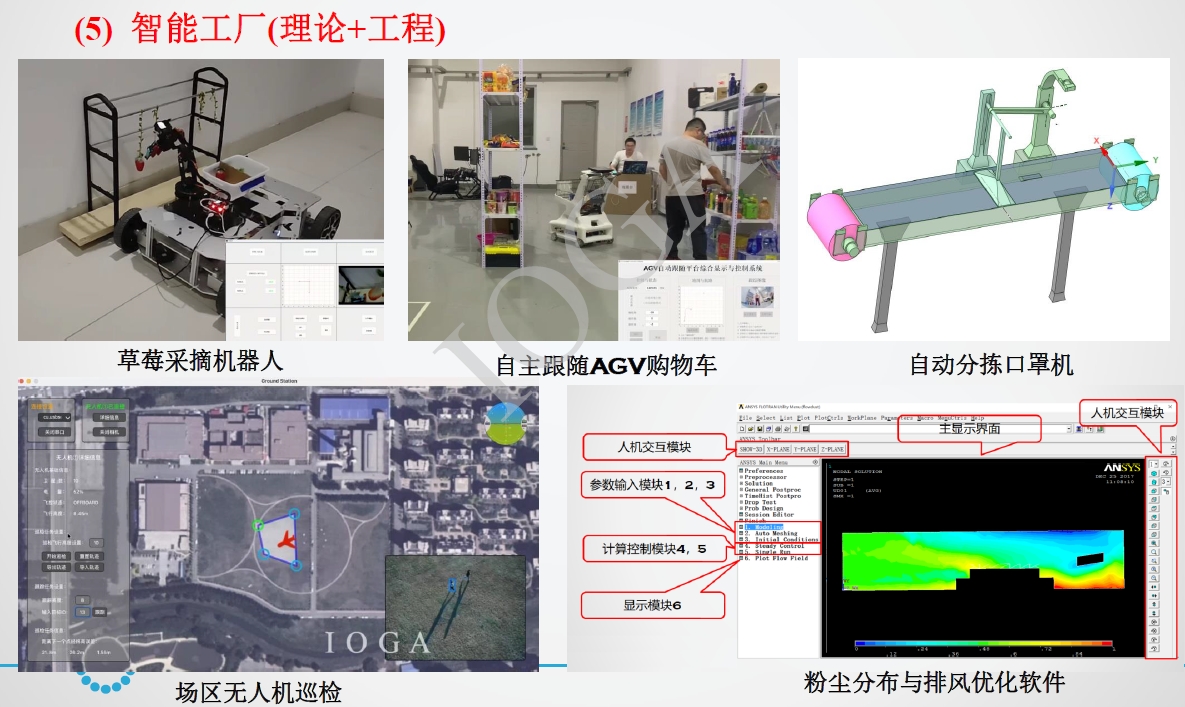
[20] 横向课题:隧道内通风除尘风场分析软件设计与开发
[21] 横向课题:自动跟随AGV系统设计与开发
主要论著(第一作者)
[1] Xiao Liang*, Zikang Su, Wenzhe Zhou, Guanglei Meng and Linlin Zhu. Fault-tolerant Control for the Multi-quadrotors Cooperative Transportation under Suspension Failures. Aerospace Science and Technology, 2021, 119: 107139. (SCI检索 WOS:000711637400008, 一区, TOP)
[2] Xiao Liang*, Shirou Zhao, Guodong Chen, Guanglei Meng and Yu Wang. Design and Development of Ground Station for UAV/UGV Heterogeneous Collaborative System. Ain Shams Engineering Journal, 2021, 12(4): 3879-3889. (SCI检索 WOS:000721350400002, 二区)
[3] Xiao Liang*, Honglun Wang, Haitao Luo.Collaborative Pursuit-Evasion Strategy of UAV/UGV Heterogeneous System in Complex Three-Dimensional Polygonal Environment. Complexity, 2020, 2020: 7498740. (SCI检索 WOS:000559110400007, 二区)
[4] Xiao Liang*, Boran Zhou, Linping Jiang, Guanglei Meng and Yiwei Xiu. Collaborative pursuit-evasion game of multi-UAVs based on Apollonius circle in the environment with obstacle. Connection Science, 2023, 35(1): 2168253. (CCF期刊C类,SCI检索 WOS:000934902200001, 四区)
[5] Xiao Liang*, Guodong Chen, Shirou Zhao, Yiwei Xiu. Moving Target Tracking Method for UAV/UGV Heterogeneous System Based on Apriltag. Measurement and Control, 2020, 53(3-4): 427-440. (SCI检索 WOS:000537193300015, 四区)
[6] Xiao Liang*, Guanglei Meng, Yimin Xu, Haitao Luo. A Geometrical Path Planning Method for Unmanned Aerial Vehicle in 2D/3D Complex Environment. Intelligent Service Robotics, 2018, 11(3): 301-312. (SCI检索 WOS:000435825400007, 三区)
[7] X Liang*, G Meng, H Luo, X Chen. Dynamic Path Planning Based on Improved Boundary Value Problem for Unmanned Aerial Vehicle. Cluster Computing, 2016, 19(4): 1-10. (SCI检索 WOS:000388972000030, 二区)
[8] Xiao Liang*, Linlin Zhu, Lingyu Liu, Yu Wang. Collaborative Framework and Capture Strategy for UAV/UGV System. IEEE Transactions on Robotics, 已录用. (SCI检索)
[9] 梁 宵*, 王宏伦, 骆海涛. 复杂三维多面体环境中空地协作追逃问题. 控制理论与应用, 2021. 38(5): 623-633. (EI期刊)
[10] Xiao LIANG*, Maoxian SHEN, Guangxun DU, Guodong CHEN. Real-time Moving Target Tracking Algorithm of UAV/UGV Heterogeneous Collaborative System in Complex Background. UPB scientific bulletin (series C), 2019, 81(1): 119-136. (EI期刊)
[11] Xiao LIANG*, Guodong Chen, Shirou Zhao, Yiwei Xiu. Moving Target Tracking of UAV /UGV Heterogeneous System Based on Quick Response Code. UPB scientific bulletin (series C) , 2019, 81(3): 77-92. (EI期刊)
[12] X Liang*, G Meng, X Chen, T Zhang. A Novel Model Reference Adaptive Controller of Quad-rotor on Autonomous Take-off and Landing with Ground Effect, International Journal of Simulation Systems. Science & Technology, 2016, 17(29): 22.1-22.7. (EI期刊)
[13] X Liang*, G Chen, J Wang, Z Bi, P Sun. An Adaptive Control System for Variable Mass Quad-rotor UAV Involved in Rescue Missions. International Journal of Simulation Systems, Science & Technology, 2016, 17(28): 31.1-31.7. (EI期刊)
[14] Liang Xiao*, Meng Guanglei, Tong Shengxi, Liu Xiaoqing. Rapid Multi-objective Optimization for Airfoil Design Based on Improved Genetic Algorithm. Acta Aerodynamica Sinica, 2016, 34(6): 825-836. (一级学报)
[15] X Liang*, G Meng, X Chen, H Luo. Randomized Pursuit-Evasion Based on Lion and Man Problem for UAV in a Polygonal Environment. Computer Science - Research and Development, 2015, 33(8): 875-884. (EI期刊)
[16] 梁 宵*,孟光磊,陈新禹,陈侠.三维真实地形环境下无人机救援航路规划方法,北京航空航天大学学报,2015.41(7):1183-1187. (EI期刊)
[17] Xiao Liang*, Guodong Chen, Shirou Zhao, Yiwei Xiu. Remote Guidance Method of Unmanned Aerial Vehicle Based on Multi-sensors. 2019 IEEE International Conference on Unmanned Systems, Beijing, China, 2019.10.17 -2019.10.19. (EI会议)
[18] Xiao Liang*, Shirou Zhao, Guodong Chen, Yiwei Xiu. Design and Development of Ground Control System for Tethered UAV. 2019 IEEE International Conference on Unmanned Systems, Beijing, China, 2019.10.17 -2019.10.19. (EI会议)
[19] Xiao Liang*, Honglun Wang, Dawei Li, Chang Liu. Three-dimensional Path Planning for Unmanned Aerial Vehicles Based on Fluid Flow. 2014 IEEE Aerospace Conference, Big Sky, MT, USA, 2014.03.01-2014.03.08. (EI会议)
[20] 梁 宵*, 陈国栋, 沈茂先, 朱琳琳, 赵诗柔. UAV/UGV协作系统中复杂背景环境下的目标跟踪算法. 控制与决策, 已录用. (EI期刊)
知识产权
[1] 梁 宵, 赵诗柔. UAV/UGV异构协作监控软件V1.0. 2020.10.30, 软件著作权登记, 2020SR1248429
[2] 梁 宵, 佟广博, 孟光磊, 张太宁. 一种便携式车载移动平台. 2021.07.16, 实用新型, CN213705589U (已授权)
[3] 梁 宵, 陈侠, 孟光磊. 一种基于边界值问题的滚动航路规划方法. 2017.06.30, 发明专利, ZL201410317276.2 (已授权)
[4] 梁 宵, 孟光磊, 田丰, 陈国栋. 一种基于理想流体数值计算的三维航路规划方法. 2017.04.05, 发明专利, ZL201410639743.3 (已授权)
[5] 梁 宵, 陈国栋, 沈茂先, 赵诗柔. 一种基于空地数据链远程图像在线处理平台快速搭建方法.2018.11.04, 发明专利, CN201811432765.7 (已受理)
[6] 梁 宵, 陈国栋, 沈茂先, 赵诗柔. 一种基于SBUS协议模拟遥控的多旋翼自主飞行控制方法.2018.11.14, 发明专利, CN201811443459.3 (已受理)
[7] 梁 宵, 陈国栋, 沈茂先, 赵诗柔. 一种多旋翼飞行器自动控制系统及其控制方法. 2018.04.02, 发明专利, CN201810283213 (已受理)
[8] 梁 宵,孟光磊,田丰,陈国栋,一种威胁环境下基于导引速度场的航路规划方法,2014.11.12,发明专利,CN201410639837.0 (已受理)
[9] 孟光磊, 潘海兵, 梁 宵, 田 丰. 两栖多功能垂直起降飞行器. 2016.06.28, 发明专利,ZL201610482793.4 (已授权)
[10] 孟光磊, 罗元墙, 梁 宵, 田 丰. 基于可插拔式接口的固定翼飞行器快速建模设计方法.2016.06.28, 发明专利, CN201610487530.2 (已受理)
[11] 孟光磊, 潘海兵, 梁 宵, 田 丰. 一种带有四个辅助翼的混合动力无人机及其控制方法.2016.05.25, 发明专利, CN201610350995.3 (已受理)
[12] 田丰, 张涛, 孟光磊, 梁 宵. 一种基于模糊控制算法的战机机动动作智能识别方法.2014.07.18, 发明专利, ZL201410345537.1 (已授权)
Personal profile
Liang Xiao is a professor and PhD supervisor of Shenyang Aerospace University, China. He has been a full-time undergraduate at Northeastern University and received B.S.E. of automation in 2007. At the same year, he was recommended as the postgraduate without entrance examination, majoring in control theory and control engineering and then received master’s degree in 2009. In 2013, He received Ph.D. degree in navigation, guidance and control at Beihang University, China. He now works in School of Automation, Shenyang Aerospace University and was appointed associate director of Key Laboratory of Liaoning Province. In 2015, he visited and exchanged with Swansea University (United Kingdom). His research interests cover unmanned aerial/ground vehicles, GNC (navigation, guidance and control), intelligent decision making and path planning. For the moment, he is the host of several research projects including National Natural Science Foundation of China, Aeronautical Science Foundation of China and Natural Science Foundation of Liaoning Province. Now, he has published about 30 academic papers in well-known international journals. In addition, he was authorized 5 items of national invention patent.
Research
l Aircraft Design, Navigation, Guidance and Control (GNC), Aircraft Simulation
l Artificial Intelligence, Game and Decision, Mission Planning
l Heterogeneous Multi-agents, Hardware/Software Design and Development of Automatic Control System
Contact information
Office:Mechanical Building 308-1, School of Automation, Shenyang Aerospace University
Email:connyzone@126.com
Telephone Number:86-024-89723961
Awards
[1] Progress in Science and Technology of Liaoning Province, Second Prize, 2021 (3/6)
[2] Chinese Society of Astronautics (CSA), Science and Technology Award, Third Prize, 2019 (1/10)
[3] Chinese Society of Astronautics (CSA), Science and Technology Award, Second Prize, 2019 (3/10)
[4] The 15th China Graduate Electronic Design Competition, National finals, Second Prize, 2020 (1/6)
[5] The 16th “Challenge Cup” National Undergraduate curricular academic science and technology works, National finals, Second Prize, 2019 (1/6)
[6] The 14th China Graduate Electronic Design Competition, National finals, Second Prize, 2019 (1/6)
[7] The 13th China Graduate Electronic Design Competition, National finals, First Prize, 2018 (1/6)
[8] Liaoning BaiQianWan Talents Program, Qian level, 2020
[9] Program of Liaoning Talents, Top level, 2019
[10] Liaoning BaiQianWan Talents Program, Wan level, 2017
[11] Top-level talents of Shenyang, 2020
[12] High-level talents of Shenyang, 2017
[13] Progress in Science and Technology of Liaoning Province, Third Prize, 2015 (3/6)
[14] Progress in Science and Technology of Shenyang City, Second Prize, 2015 (3/6)
Research project (Host)
[1] National Natural Science Foundation of China: Research on Heterogeneous Collaborative Pursuit-Evasion Game in Three-dimensional Complex Environment with Incomplete Information.
[2] National Natural Science Foundation of China: Path Planning Based on Pursuit-Evasion Game in Three-dimensional Complex Environment for UAV.
[3] Aeronautical Science Foundation of China: Collaborative Location and 3D Map Fusion Reconstruction Based on UAV/UGVs Heterogeneous System without GPS Information.
[4] Aeronautical Science Foundation of China: Collaborative Hunting Method Based on Finite Visual Field of UAV/UGV Heterogeneous System in Complex 3D Adversarial Environment.
[5] Natural Science Foundation of Liaoning Province: Collaborative Sensing and Obstacle Avoidance of UAV/UGV Heterogeneous System in Rescue Missions.
[6] Natural Science Foundation of Liaoning Province: Dynamic Tracking, Obstacle Avoidance and Precise Guidance Technology for UAV/UGV Heterogeneous Mobile Platform Robots.
[7] Fund of Liaoning Province Education Department: UAV/UGV Heterogeneous Cooperative Security and Rescue System Based on Multi-sensor Information Fusion.
[8] Fund of Liaoning Province Education Department: Integrated Control of Four-rotor Autonomous take-off/flight/throwing/landing in Rescue Missions under Severe Weather.
[9] Science and Technology Plan Project of Shenyang City: Collaborative Awareness, Avoidance and Pursuit of UAV/UGV Heterogeneous System in 3D Complex Environment.
[10] Talent support plan: Research on Security and Rescue UAV/UGV Heterogeneous Cooperation System Based on Multi-sensor Information Fusion.
[11] Talent support plan: Situation Deduction Theory and Path Planning of UAV in Dynamic Environment.
[12] Teaching Reform Project of Undergraduate: Review of "Control Engineering" Based on Online Open Resources.
[13] Fund of Key laboratory: Design and Development of Four-axis Eight-paddle Tethered UAV.
[14] Fund of Key laboratory: Design and Development of Civil Aviation Flight Simulator.
[15] Other Project: Design and Development of XXX Intelligent Mobile Robot Platform.
[16] Other Project: Design and Development of Analysis Software for Ventilation and Dust Removal Field in Tunnel.
[17] Other Project: Design and development of AGV system with automatic following .
Main works (First author)
[1] Xiao Liang*, Zikang Su, Wenzhe Zhou, Guanglei Meng and Linlin Zhu. Fault-tolerant Control for the Multi-quadrotors Cooperative Transportation under Suspension Failures. Aerospace Science and Technology, 2021, 119: 107139. (SCI WOS:000711637400008, Q1, TOP)
[2] Xiao Liang*, Shirou Zhao, Guodong Chen, Guanglei Meng and Yu Wang. Design and Development of Ground Station for UAV/UGV Heterogeneous Collaborative System. Ain Shams Engineering Journal, 2021, 12(4): 3879-3889. (SCI WOS:000721350400002, Q2)
[3] Xiao Liang*, Honglun Wang, Haitao Luo.Collaborative Pursuit-Evasion Strategy of UAV/UGV Heterogeneous System in Complex Three-Dimensional Polygonal Environment. Complexity, 2020, 2020: 7498740. (SCI WOS:000559110400007, Q2)
[4] Xiao Liang*, Guodong Chen, Shirou Zhao, Yiwei Xiu. Moving Target Tracking Method for UAV/UGV Heterogeneous System Based on Apriltag. Measurement and Control, 2020, 53(3-4): 427-440. (SCI WOS:000537193300015, Q4)
[5] Xiao Liang*, Guanglei Meng, Yimin Xu, Haitao Luo. A Geometrical Path Planning Method for Unmanned Aerial Vehicle in 2D/3D Complex Environment. Intelligent Service Robotics, 2018, 11(3): 301-312. (SCI WOS:000435825400007, Q3)
[6] X Liang*, G Meng, H Luo, X Chen. Dynamic Path Planning Based on Improved Boundary Value Problem for Unmanned Aerial Vehicle. Cluster Computing, 2016, 19(4): 1-10. (SCI WOS:000388972000030, Q2)
[7] Xiao Liang*, Linlin Zhu, Lingyu Liu, Yu Wang. Collaborative Framework and Capture Strategy for UAV/UGV System. IEEE Transactions on Robotics, accept. (SCI)
[8] Xiao Liang*, Honglun Wang, Haitao Luo. Collaborative pursuit-evasion of air-ground system in a complex 3D polyhedral map. Control Theory and Applications, 2021, 38(5): 623-633. (EI/Journal)
[9] Xiao LIANG*, Maoxian SHEN, Guangxun DU, Guodong CHEN. Real-time Moving Target Tracking Algorithm of UAV/UGV Heterogeneous Collaborative System in Complex Background. UPB scientific bulletin (series C), 2019, 81(1): 119-136. (EI/Journal)
[10] Xiao LIANG*, Guodong Chen, Shirou Zhao, Yiwei Xiu. Moving Target Tracking of UAV /UGV Heterogeneous System Based on Quick Response Code. UPB scientific bulletin (series C), 2019, 81(3): 77-92. (EI/Journal)
[11] X Liang*, G Meng, X Chen, T Zhang. A Novel Model Reference Adaptive Controller of Quad-rotor on Autonomous Take-off and Landing with Ground Effect, International Journal of Simulation Systems. Science & Technology, 2016, 17(29): 22.1-22.7. (EI/Journal)
[12] X Liang*, G Chen, J Wang, Z Bi, P Sun. An Adaptive Control System for Variable Mass Quad-rotor UAV Involved in Rescue Missions. International Journal of Simulation Systems, Science & Technology, 2016, 17(28): 31.1-31.7. (EI/Journal)
[13] Liang Xiao*, Meng Guanglei, Tong Shengxi, Liu Xiaoqing. Rapid Multi-objective Optimization for Airfoil Design Based on Improved Genetic Algorithm. Acta Aerodynamica Sinica, 2016, 34(6): 825-836. (EI/Journal)
[14] X Liang*, G Meng, X Chen, H Luo. Randomized Pursuit-Evasion Based on Lion and Man Problem for UAV in a Polygonal Environment. Computer Science - Research and Development, 2015, 33(8): 875-884. (EI/Journal)
[15] Xiao Liang *, Guanglei Meng, Xinyu Chen, Xia Chen.Path Planning for UAV under Three-dimensional Real Terrain in Rescue Mission, Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(7):1183-1187. (In Chinese, EI/Journal)
[16] Xiao Liang*, Guodong Chen, Shirou Zhao, Yiwei Xiu. Remote Guidance Method of Unmanned Aerial Vehicle Based on Multi-sensors. 2019 IEEE International Conference on Unmanned Systems, Beijing, China, 2019.10.17 -2019.10.19. (EI/Conference)
[17] Xiao Liang*, Shirou Zhao, Guodong Chen, Yiwei Xiu. Design and Development of Ground Control System for Tethered UAV. 2019 IEEE International Conference on Unmanned Systems, Beijing, China, 2019.10.17 -2019.10.19. (EI/Conference)
[18] Xiao Liang*, Honglun Wang, Dawei Li, Chang Liu. Three-dimensional Path Planning for Unmanned Aerial Vehicles Based on Fluid Flow. 2014 IEEE Aerospace Conference, Big Sky, MT, USA, 2014.03.01-2014.03.08. (EI/Conference)
Patents (First author)
[1] Xiao Liang*, Xia Chen, Guanglei Meng. A Path Planning Method with Receding Horizon Based on Boundary Value Problem. 2017.06.30, China, ZL201410317276.2 (Authorized)
[2] Xiao Liang*, Guanglei Meng, Feng Tian, Guodong Chen. A Three-dimensional Path Planning Method Based on Numerical Calculation of Ideal Fluid. 2017.04.05, China, ZL201410639743.3 (Authorized)
[3] Xiao Liang*, Guodong Chen, Maoxian Shen, Shirou Zhao. Fast Construction Method of Remote Image Online Processing Platform Based on Air-ground Data Link System. 2018.11.04, China, CN201811432765 (Accepted)
[4] Xiao Liang*, Guodong Chen, Maoxian Shen, Shirou Zhao. Multi-rotor Autonomous Flight Control Method Based on SBUS Protocol and Analog Remote Control. 2018.11.14, China, CN201811443459 (Accepted)
[5] Xiao Liang*, Guodong Chen, Maoxian Shen, Shirou Zhao. Automatic Control System and Control Method of Multi-rotor Aircraft. 2018.04.02, China, CN201810283213 (Accepted)
[6] Xiao Liang*, Guanglei Meng, Feng Tian, Guodong Chen. Path Planning Method Based on Guided Velocity Field in Threat Environment, 2014.11.12, China, CN201410639837 (Accepted)
