个 人 简 介
孟光磊,博士,教授,沈阳航空航天大学自动化学院院长,辽宁省兴辽英才青年拔尖人才,沈阳市领军人才。
一、学习、工作经历
2005年7月,毕业于山东大学计算机科学与技术专业,获得本学士学位;
2005年9月,被北京航空航天大学导航、制导与控制专业录取,硕博连读;
2011年7月,毕业于北京航空航天大学导航、制导与控制专业,获得博士学位。
2011年7月至今,在沈阳航空航天大学工作。
二、科学研究
多年来一直从事先进飞行仿真技术、空战智能决策技术方面的研究。
获得省部级科技奖励4项,包括:中国航空学会科学技术二等奖1项,排名第1;辽宁省科技进步二等奖排名第2;辽宁省科技进步三等奖1项,排名第2;中国航空学会科学技术三等奖1项,排名第4;沈阳市科技进步二等奖1项,排名第2。
主持装备预研共用技术项目、北部战区空军重点项目、航空科学基金、辽宁省兴辽英才青年拔尖人才项目、辽宁省自然科学基金,沈阳市中青年科技创新计划,辽宁省教育厅项目,以及国防领域研究课题27项。主持项目经费4000余万元。
授权发明专利7项,软件著作权登记7项,发表论文20余篇。
三、科研成果
1. 获奖情况
申请人获得省部级科技奖励4项,包括:
(1) 中国航空学会科学技术奖励,基于人工智能的高逼真度多任务飞行模拟训练关键技术研究与应用,证书编号: HKJ2019-002-R10-1,二等奖,排名1,2019年;
(2) 辽宁省科技进步奖,飞行任务驱动的飞行模拟训练关键技术及应用,证书编号:2020-J-2-40-R02,二等奖,排名2,2021年;
(3) 辽宁省科技进步奖,开放式多任务通用飞机训练器,证书编号:2015J-3-043-02,三等奖,排名2,2021年;
(4) 沈阳市科技进步奖,LE500飞行/机务训练器(通用飞机训练器),证书编号:2015J-2-9-2,二等奖,排名2,2015年;
(5) 中国航空学会科学技术奖励,三维复杂环境中UAV/UGV异构系统的协作感知、避障与任务决策技术研究,三等奖,排名4,2019年。
2. 代表性论文
[1] Zhixiao Sun,Haiyin Piao,Guanglei Meng etc. Multi-agent hierarchical policy gradient for Air Combat Tactics emergence via self-play[J].Engineering Applications of Artificial Intelligence,2021, 98:1-14.(SCI检索,共同一作)
[2] Guanglei Meng,Runnan Zhao, Mingzhe Zhou. Target Tactical Intention Recognition in Multi-aircraft Cooperative Air Combat[J/OL]. International Journal of Aerospace Engineering: 1-18[2021-11-09]. https://doi.org/10.1155/2021/ 9558838.(SCI检索)
[3] 孟光磊,张慧敏,朴海音,周铭哲.非完备信息下的超视距空战双机协同战术识别[J/OL].北京航空航天大学学报:1-18[2021-11-25]. https://doi.org/10.13700/j.bh.1001-5965.2021.0251.(EI检索)
[4] 孟光磊,周铭哲,朴海音,张慧敏.基于协同战术识别的双机编队威胁评估方法[J].系统工程与电子技术,2020,42(10):2285-2293.(EI检索)
[5] 孟光磊,刘德见,周铭哲,朴海音,陈耀飞.近距空战训练中的智能虚拟对手决策与导引方法[J/OL].北京航空航天大学学报:1-19 [2021-11-25]. https://doi.org/10.13700/j.bh.1001-5965. 2020. 0687.(EI检索)
[6] 孟光磊,张慧敏,朴海音,梁宵,周铭哲.自动化飞行训练评估中的战机机动动作识别[J].北京航空航天大学学报,2020,46(07):1267-1274.(EI检索)
[7] 孟光磊,龚光红.基于混合贝叶斯网的空域目标威胁评估方法[J].系统工程与电子技术,2010,32(11):2398-2401.(EI检索)
[8] Piao, Haiyin, Sun Zhixiao, Meng, Guanglei etc. Beyond Visual Range Air Combat Tactics Auto Generation by Reinforcement Learning, Proceedings of the International Joint Conference on Neural Networks, 2020International Joint Conference on Neural Networks, IJCNN 2020 - Proceeding,2020.7. (EI检索)
[9] Meng Guanglei, Zhou Mingzhe, Zhang Huimin; Sun Donglai. Threat assessment for rotte based on cooperative tactical recognition, Proceedings-2019 IEEE International Confere nces on Ubiquitous Computing and Communications and Data Science and Computational Intelligence and Smart Computing, Networking and Services, IUCC/DSCI/SmartCNS 2019,2019.10, 490-494.(EI检索)
[10]Meng Guanglei, Zhang Cheng, Liu Shouye, Zhao Runnan. UAV attack and defense optimization guidance method based on target trajectory prediction, Proceedings-2019 IEEE International Conferences on Ubiquitous Computing and Communications and Data Science and Computational Intelligence and Smart Computing, Networking and Services, IUCC/DSCI/SmartCNS 2019, 2019.10,495-499.(EI检索)
[11]Meng Guanglei, Pan Haibing, Liang Xiao, Tian Feng. Allowable missile launch zone calculation for multi-fighter coordination attack under network targeting environment, Proceedings of the 28th Chinese Control and Decision Conference, CCDC 2016,2016.8.3,2143-2146.(EI检索)
[12]孟光磊,马晓玉,刘昕,徐一民.基于混合动态贝叶斯网的无人机空战态势评估[J].指挥控制与仿真,2017,39(04):1-6+39.
[13]孟光磊,罗元强,梁宵,徐一民.基于动态贝叶斯网络的空战决策方法[J].指挥控制与仿真,2017,39(03):49-54.
[14]孟光磊,郭金龙,刘建波,傅莉.智能化战机编队指派的战术匹配寻优算法[J].火力与指挥控制,2014,39(02):21-24.
[15]Liang Xiao, Meng Guanglei, Xu Yimin, Luo Haitao. A geometrical path planning method for unmanned aerial vehicle in 2D/3D complex environment, Intelligent Service Robotics, 2018, 11:301–312.(SCI检索)
[16]Liang Xiao, Meng Guanglei, Luo Haitao, Chen Xia. Dynamic path planning based on improved boundary value problem for unmanned aerial vehicle, Cluster Computing, 2016, 19: 2087-2096.(SCI检索)
[17]刘浩,王昊,孟光磊,吴昊,周铭哲.基于动态贝叶斯网络和模糊灰度理论的飞行训练评估[J].航空学报,2021,42(08):250-261.(EI检索)
[18]杨晨,张少卿,孟光磊.多无人机协同任务规划研究[J].指挥与控制学报,2018,4(03):234-248.
[19]傅莉,谢福怀,孟光磊,王东政.基于滚动时域的无人机空战决策专家系统[J].北京航空航天大学学报,2015,41(11):1994-1999.(EI检索)
[20]来淼,龚光红,方澄,孟光磊.飞机CGF用于战术模拟训练的关键因素研究[J].指挥控制与仿真,2011,33(05):76-79.
3. 授权发明专利
(1) 发明专利:基于可插拔式接口的固定翼飞行器快速建模设计方法,专利号: 200910077120
(2) 发明专利:两栖多功能垂直起降飞行器,专利号:2016104827934。
(3) 发明专利:基于有限状态机的自动编队飞行控制方法,专利号: 200910077120;
(4) 发明专利:一种基于理想流体数值计算的无人机三维航路规划方法, 专利号:2014106397433;
(5) 发明专利:一种基于边界值问题的滚动航路规划方法,专利号:2014103172762;
(6) 发明专利:一种基于模糊控制算法的战机机动动作智能识别方法,专利号:2014103455371;
(7) 发明专利:基于舰载机进舰速度调节的母舰甲板运动补偿策略,专利号:201610881797.X.
4. 获软件著作权
(1) 孟光磊、田丰.无人机摄影测量影像处理软件V1.0.计算机软件著作权登记号:2013SR068350.
(2) 孟光磊、田丰.小鹰500飞行模拟器视景仿真软件V1.0.计算机软件著作权登记号:2013SR067389.
(3) 孟光磊、喻勇涛、田丰、何冠男、武军伟.多种气象条件下飞行视景软件V1.0.计算机软件著作权登记号:2018SR930855
(4) 孟光磊、田丰、喻勇涛、曲晋瑶.通用飞机飞行员训练记录和讲评系统V1.0.计算机软件著作权登记号:2018SR929980.
(5) 孟光磊、田丰、赵铁楠、薛继佳、刘鸿宇、陈志勇.通用操纵负荷控制系统软件V1.0.计算机软件著作权登记号:2019SR00427544.
(6) 孟光磊、张成、田丰、喻勇涛、赵铁楠、薛继佳.可配置气动参数的飞机模型软件V1.0.计算机软件著作权登记号:2019SR0054231.
5. 研发产品:
依托工信部民机专项、航空科学基金、沈阳市工业和信息产业技术创新计划,以及多项航空航天领域横向合作课题,作为技术总负责人先后研发LE500通用飞机飞行/机务训练器和锐翔轻型电动飞机模拟器。
石家庄飞机工业有限公司将LE500通用飞机飞行/机务训练器应用于飞行员培训,使飞行员培训成本降低20%。将其应用于海鸥300飞机研制过程中的飞行性能和飞行控制、制导、导航等系统的研究,缩短了飞行器系统的研制时间、优化投入产出比。


图1 LE500通用飞机飞行/机务训练器
锐翔轻型电动飞机模拟器能够满足通用航空飞行和机务人员的初始培训和转机型培训,降低飞行员培训成本,提高培训效率,满足通用航空对飞行员的需求。同时,锐翔轻型电动飞机模拟器系统的研制成功填补了我国在电动飞机模拟器技术领域的空白,对于提升我国通用航空技术研发实力,带动相关配套产业的发展,拉长高科技产业链条,起到至关重要的促进作用,具有重要的经济和社会效益。
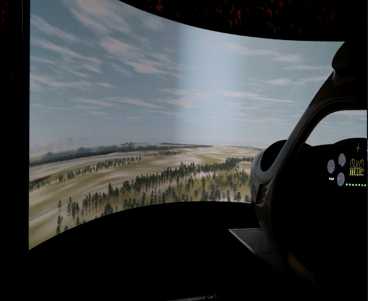

图2 锐翔轻型电动飞机模拟器
目前,每名通用航空飞行员取得商照的培训成本约为30万元,应用飞行模拟器进行教学,可使飞行员培训成本降低20%,效率提高15%以上。在LE500通用飞机飞行/机务训练器和锐翔轻型电动飞机模拟器研发过程中,强调飞行模拟器共性技术研究,提出的技术方法既可以满足对应型号的飞行员培训需求,也可为其它类型通用飞机模拟器研制提供技术支撑,可大大降低飞行训练设施的研发成本,提高通用航空飞行员的培训效率。产品研发团队以通用飞机模拟训练装备应用基础研究、实用技术开发和成果转化为重点,服务辽宁省和沈阳市航空装备制造产业发展战略,为我省、市航空高科技产业的发展和经济增长增添强大的动力。
